The intricate world of dexterous robotic hands represents one of the most challenging frontiers in precision manufacturing. These sophisticated components require exceptional accuracy, material knowledge, and advanced CNC machining techniques to achieve the functionality that mimics human dexterity.
This article explores the critical aspects of manufacturing these complex components, from material selection to finishing processes that ensure optimal performance in robotics, prosthetics, and automation applications.
Applications of Dexterous Robotic Hands

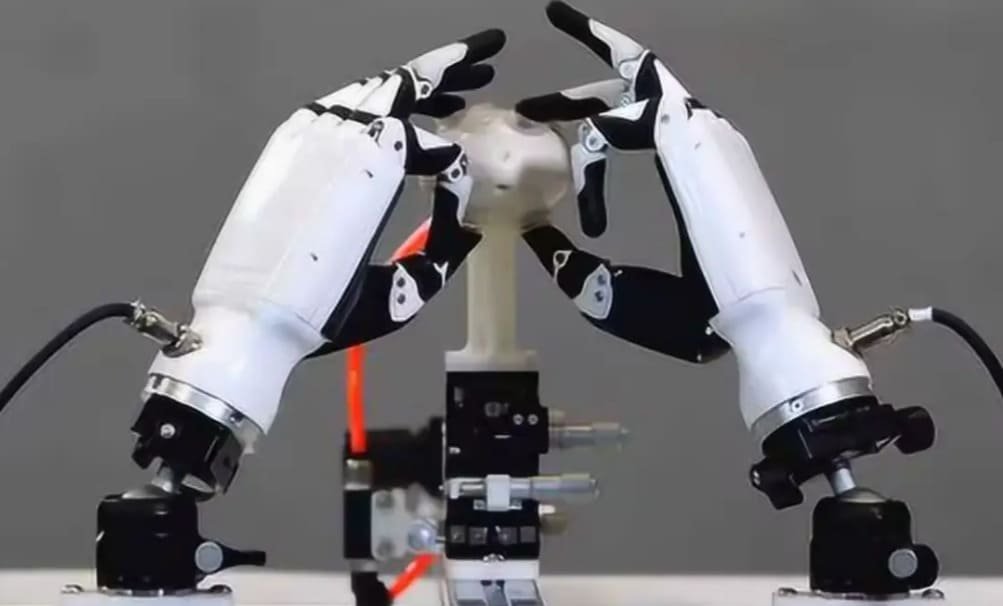
Dexterous robotic hands have revolutionized multiple industries by replicating human-like grasping and manipulation capabilities. These sophisticated mechanisms enable robots to perform complex tasks with unprecedented precision and adaptability.
Industrial Automation
In manufacturing environments, dexterous hands enable robots to handle delicate components, perform intricate assembly operations, and adapt to varying product specifications. Their ability to manipulate tools with human-like dexterity has transformed production processes across electronics, automotive, and consumer goods industries.
Medical Prosthetics
Modern prosthetic limbs utilize CNC machined components to create lightweight, responsive artificial hands. These prosthetics offer unprecedented functionality, allowing users to perform delicate tasks like typing, gripping various objects, and even playing musical instruments with remarkable precision.
Research Robotics
In research settings, dexterous robotic hands serve as platforms for advancing our understanding of grasping mechanics, tactile sensing, and human-robot interaction. These sophisticated devices enable scientists to explore new frontiers in artificial intelligence, biomechanics, and autonomous systems.
Manufacturing Challenges for Dexterous Hand Components

Creating components for dexterous robotic hands presents unique manufacturing challenges that push the boundaries of conventional CNC machining. These specialized parts require exceptional precision and innovative approaches to achieve the required functionality.
Miniaturization Constraints
Dexterous hand components often require extreme miniaturization while maintaining structural integrity. Finger joints, linkages, and actuator housings must be compact yet durable, pushing the limits of material properties and machining capabilities. This miniaturization challenge requires specialized micro-machining techniques and tools capable of achieving tolerances measured in micrometers.
Complex Geometries
The biomimetic design of robotic hands involves complex curved surfaces, internal channels, and intricate joint mechanisms. These geometries often require 5-axis CNC machining to access difficult angles and create seamless transitions between surfaces. Achieving these complex shapes while maintaining tight tolerances represents a significant manufacturing challenge.
Balancing Weight and Strength
Robotic hand components must be lightweight to reduce power requirements and improve responsiveness, yet strong enough to withstand operational forces. This balance often necessitates sophisticated material selection and strategic design approaches, such as internal lattice structures that can only be created through advanced CNC techniques.
Integration of Multiple Systems
Modern dexterous hands incorporate sensors, actuators, and control systems within extremely limited space. CNC machined components must include precise channels, mounting points, and interfaces for these systems, requiring meticulous planning and execution during the manufacturing process.
Material Selection for Dexterous Hand Components
The performance of dexterous robotic hands depends significantly on appropriate material selection. Different components require specific material properties to achieve optimal functionality, durability, and weight characteristics.
| Material | Key Properties | Ideal Applications | Machining Considerations |
| Aluminum Alloys (6061-T6, 7075) | Lightweight, good strength-to-weight ratio, excellent machinability | Structural frames, finger linkages, palm chassis | High cutting speeds, minimal tool wear, excellent surface finish |
| Titanium Alloys (Ti-6Al-4V) | Superior strength-to-weight ratio, corrosion resistance, biocompatibility | High-stress joints, load-bearing components, prosthetic interfaces | Requires specialized tooling, lower cutting speeds, proper cooling |
| Stainless Steel (316L, 17-4 PH) | High strength, excellent corrosion resistance, good wear properties | Gears, shafts, high-wear components | Moderate cutting speeds, heat management critical |
| Engineering Plastics (PEEK, Delrin) | Self-lubricating, chemical resistance, electrical insulation | Bearing surfaces, sensor housings, electrical insulators | Sharp tooling required, heat management to prevent melting |
| Carbon Fiber Composites | Extremely lightweight, high stiffness, vibration dampening | Finger segments, non-load bearing covers, lightweight structures | Specialized dust extraction, diamond-coated tools, delamination prevention |
Critical Tolerances and Surface Finish Requirements

The functionality of dexterous robotic hands depends heavily on achieving precise tolerances and appropriate surface finishes. These specifications ensure smooth operation, proper fit between components, and optimal performance of the assembled system.
Tolerance Requirements for Key Components
Finger Joints and Articulation Points
- Rotational joint clearances: 0.02-0.05mm
- Bearing seat diameter tolerances: ±0.01mm
- Axial play control: 0.01-0.03mm
- Angular alignment: ±0.1 degrees
Actuator Interfaces
- Motor mounting surfaces flatness: 0.02mm
- Gear mesh center distance: ±0.015mm
- Pulley alignment: ±0.05mm
- Cable routing channel position: ±0.1mm
Surface Finish Requirements
Bearing and Sliding Surfaces
- Bearing seats: Ra 0.4-0.8 μm
- Sliding contact surfaces: Ra 0.8-1.6 μm
- Shaft surfaces: Ra 0.2-0.4 μm
Sensor Mounting and External Surfaces
- Sensor mounting pads: Ra 1.6-3.2 μm
- External aesthetic surfaces: Ra 0.8-1.6 μm
- Tactile sensor interfaces: Ra 0.4-0.8 μm
Critical Note: Achieving these precision requirements often necessitates a combination of CNC machining and post-processing operations. Temperature-controlled environments are essential during both manufacturing and inspection to maintain dimensional stability.
Advanced CNC Machining Techniques for Dexterous Hand Parts

Manufacturing the complex geometries required for dexterous robotic hands demands specialized CNC machining approaches. These advanced techniques enable the creation of intricate components with the precision necessary for proper functionality.
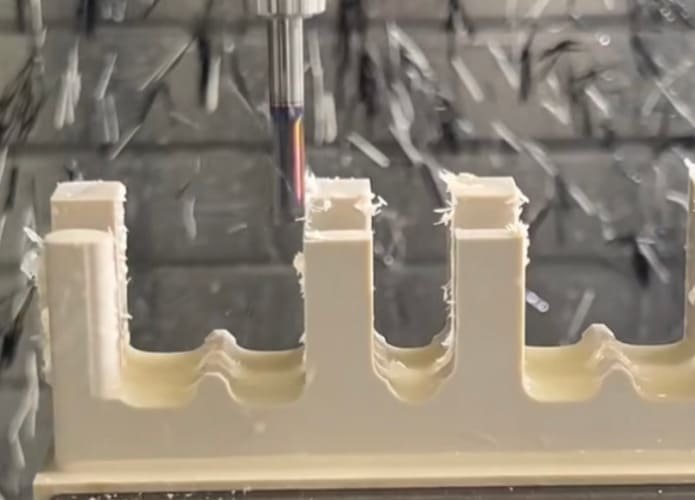
5-Axis Simultaneous Machining
5-axis CNC machining is essential for creating the complex curved surfaces and undercuts found in dexterous hand components. This technique allows the cutting tool to approach the workpiece from virtually any angle, enabling the creation of organic shapes that mimic human anatomy. The simultaneous control of all axes results in smoother transitions between surfaces and reduced machining time.
Micro-Machining Processes
Many dexterous hand components require features measured in hundredths of millimeters. Micro-machining techniques utilize specialized small-diameter cutting tools (often 0.1-0.5mm) running at high speeds to create these minute features. This approach requires precise spindle balancing, vibration control, and advanced tool path strategies to achieve the required accuracy.
High-Speed Machining (HSM)
HSM techniques are particularly valuable for creating thin-walled components common in lightweight robotic hands. By maintaining consistent chip loads and optimizing cutting parameters, HSM reduces cutting forces and heat generation, preventing distortion in delicate parts. This approach also improves surface finish, reducing the need for secondary operations.
Specialized Tooling Considerations
Custom Cutting Tools
The unique geometries of dexterous hand components often require specialized cutting tools. Custom-ground end mills with specific profiles enable the creation of complex joint surfaces in a single operation. Diamond-coated tools are frequently employed for machining abrasive composite materials, while micro-grain carbide tools provide the edge sharpness needed for fine details.
Advanced Fixturing Systems
Securing small, complex parts during machining presents significant challenges. Vacuum fixturing, magnetic workholding, and custom 3D-printed jigs are commonly employed to maintain precise positioning throughout the machining process. Multi-sided fixtures enable complete machining with minimal setups, improving dimensional accuracy between features.
Post-Processing and Finishing Methods
After CNC machining, dexterous hand components typically require specialized post-processing to achieve final specifications and performance characteristics. These finishing operations enhance functionality, durability, and aesthetic qualities.
Surface Treatment Processes
- Anodizing – Creates wear-resistant surfaces on aluminum components while allowing for color coding of parts
- Hard Coating – DLC (Diamond-Like Carbon) coatings reduce friction in articulating joints
- Passivation – Enhances corrosion resistance of stainless steel components
- Micro-blasting – Creates controlled texture for improved grip surfaces
Precision Finishing Operations
- Lapping – Achieves extremely flat surfaces for sensor mounting and sealing
- Polishing – Reduces friction in bearing surfaces and improves wear characteristics
- Deburring – Removes microscopic cutting artifacts that could interfere with movement
- Micro-honing – Creates precise internal diameters for bearing fits
Assembly Preparation
- Ultrasonic Cleaning – Removes microscopic machining residues and contaminants
- Stress Relief – Thermal or vibratory processes to stabilize dimensions
- Thread Locking – Application of specialized compounds to prevent fastener loosening
- Surface Preparation – Chemical treatments to enhance adhesive bonding where required
Case Studies
These case studies demonstrate our innovative solutions to common problems.
1. Lightweight Titanium Finger Mechanism
Challenge: Create a finger mechanism with human-like strength while minimizing weight for a prosthetic application.
Solution: Our engineers employed topology optimization software to identify areas where material could be removed without compromising structural integrity. The resulting design featured complex internal lattice structures that could only be manufactured using 5-axis CNC machining of Ti-6Al-4V titanium alloy.
Results: The final component achieved a 43% weight reduction compared to conventional designs while maintaining equivalent strength. The precision-machined joints eliminated backlash, providing responsive control for the prosthetic user.
2. Integrated Sensor Housing System
Challenge: Develop a compact housing that integrates force, position, and temperature sensors within the limited space of a robotic finger segment.
Solution: A multi-material approach was implemented, combining CNC-machined aluminum structural elements with PEEK sensor mounting interfaces. Micro-machining techniques created precise channels for sensor wiring and calibrated recesses for sensor positioning.
Results: The integrated design reduced the component count by 60% while improving sensor accuracy through precise positioning. The system maintained calibration through millions of actuation cycles due to the dimensional stability of the machined components.
Future Trends in Manufacturing Dexterous Hand Components

Hybrid Manufacturing
The integration of additive manufacturing with CNC machining is creating new possibilities for dexterous hand components. This hybrid approach allows complex internal structures to be created additively, while critical interfaces and precision features are machined to exact tolerances. The result is components with optimized weight, strength, and functionality that would be impossible to create using either process alone.
Advanced Materials Development
New materials specifically engineered for robotic applications are emerging. These include metal matrix composites that combine the machinability of aluminum with the wear resistance of ceramics, and gradient materials that transition from rigid to flexible within a single component. These materials will require new machining strategies and tooling approaches to process effectively.
AI-Driven Machining Optimization
Artificial intelligence is revolutionizing CNC programming for complex components. Machine learning algorithms analyze cutting forces, tool wear, and dimensional accuracy in real-time, automatically adjusting parameters to optimize results. This approach is particularly valuable for the challenging geometries and tight tolerances required in dexterous hand components.
Conclusion
The manufacture of dexterous robotic hand components represents a perfect intersection of advanced engineering design and precision manufacturing capabilities. As we’ve explored throughout this article, successful production of these sophisticated components requires careful material selection, specialized machining techniques, and meticulous attention to tolerances and surface finishes.
The continued advancement of CNC machining technologies, combined with innovative design approaches, is enabling the creation of increasingly capable robotic hands that more closely mimic human dexterity. These developments are expanding applications across industries, from manufacturing automation to prosthetics, creating new possibilities for human-robot collaboration.
CNCPOR uses 5-axis and Swiss CNC machining technologies to process the precision parts of dexterous hands. If you have requirements for custom precision parts, you can contact us at any time.